Ronoco
Présentation
🤖 Ronoco est né en 2021 d’une envie de démocratiser la robotique : comment permettre à des ingénieurs, étudiants ou passionnés de piloter des robots complexes sans écrire une ligne de code ? Le projet a débuté par des discussions avec des utilisateurs frustrés par la complexité de ROS, puis par des sessions de brainstorming pour imaginer une interface graphique intuitive, inspirée du no-code.
L’aventure a été rythmée par des phases de prototypage, de tests sur de vrais robots (manipulateurs et roulants), et de nombreux échanges avec la communauté open source. Les défis n’ont pas manqué : rendre l’architecture modulaire, assurer la compatibilité avec MoveIt et MoveBase, concevoir une expérience utilisateur fluide…
Ronoco, c’est aussi une histoire de partage : documentation détaillée, démos, retours d’expérience lors d’événements techniques, et la satisfaction de voir des non-développeurs réussir à programmer des robots grâce à l’outil.
Démarche et réalisations 🚀
- Analyse des besoins : identification des freins à l'adoption de ROS et des attentes des utilisateurs non techniques.
- Architecture modulaire 🧩 : création de trois modules indépendants pour répondre à différents usages :
- ronoco-vm
- ronoco-nodered
- ronoco-ui
Interpréteur graphique basé sur Flask, transformant les blocs visuels en commandes ROS.
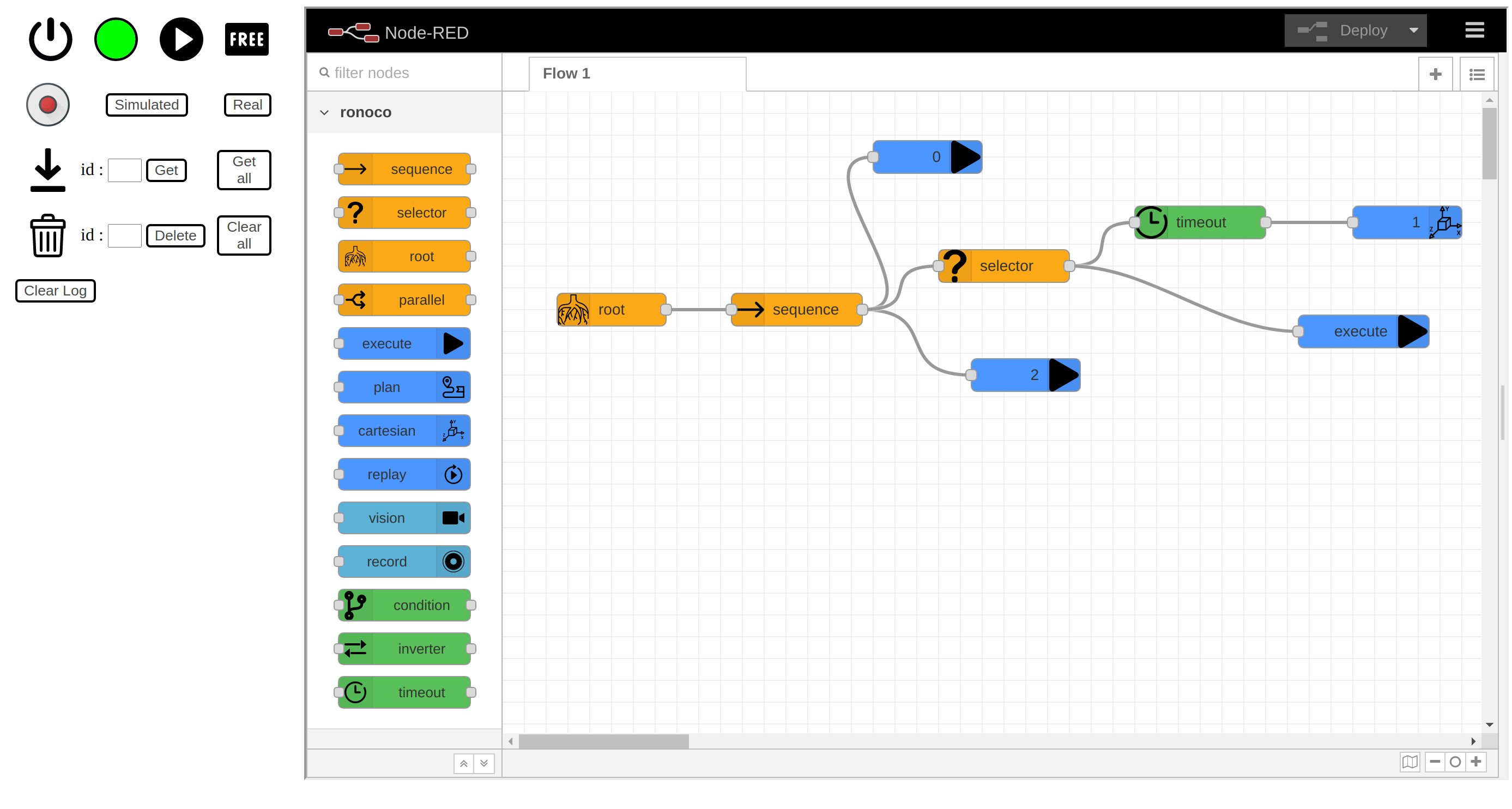
Extension Node-RED pour la création d'arbres de comportement et de séquences d'actions.
Interface web pour piloter les robots, enregistrer des positions et lancer des programmes.
- Intégration ROS : compatibilité avec MoveIt (manipulateurs) et MoveBase (robots roulants), génération de messages ROS standards.
- Expérience utilisateur 🎨 : design d'une interface graphique inspirée de Node-RED et Scratch, facilitant la prise en main.
- Documentation et communication 📝 : rédaction de guides, création de visuels et d'une démo animée pour valoriser le projet.
Technologies et outils 🛠️
- ROS (Noetic/Melodic)
- Python 3, Flask
- Node.js, npm, Node-RED
- JavaScript
- GitHub Actions pour CI
Impact et retours 🌍
Ronoco a permis à plusieurs utilisateurs non développeurs de concevoir et tester des programmes robotiques, notamment dans des contextes industriels et associatifs. Le projet a été présenté lors d'événements techniques et a suscité l'intérêt de la communauté open-source ROS.
Liens et ressources 🔗

Ronoco, c'est la volonté de rendre la robotique accessible, en supprimant la barrière du code pour la programmation de robots complexes sous ROS. ✨