EZ Wheel Navigation
Présentation
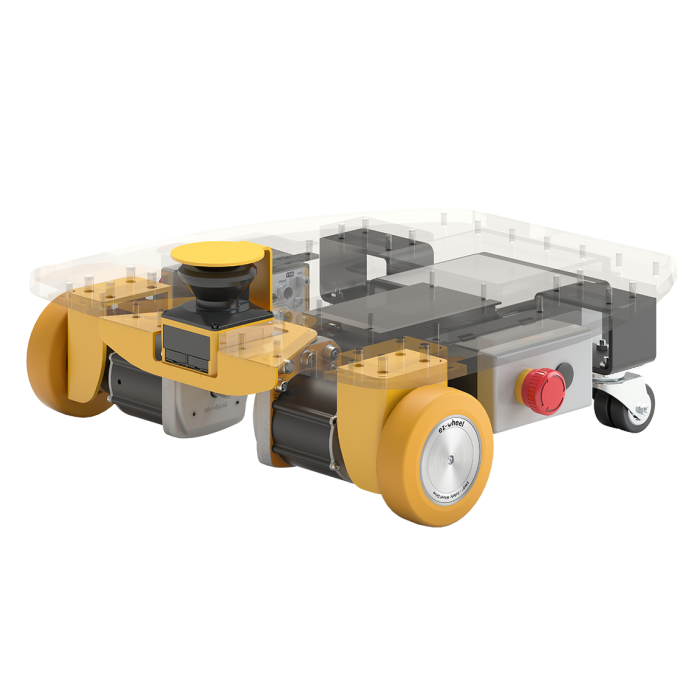
Le projet EZ Wheel Navigation s’inscrit dans le cadre de Reachy Mobile chez Eirlab, avec l’ambition de doter le robot Reachy d’une véritable mobilité sur une base motorisée EZ Wheel. L’équipe a adapté le code de pilotage, assuré la compatibilité avec les commandes de Reachy, et expérimenté la navigation sur une plateforme ouverte.
Des tests ont permis de valider la robustesse de la base, la précision des déplacements et l’intégration des capteurs. Les séances de téléopération et de navigation autonome ont permis d’optimiser les algorithmes et de documenter les résultats pour la communauté.
Démarche et réalisations 🚀
- Développement et adaptation du code de pilotage pour la base EZ Wheel
- Intégration logicielle avec Reachy Mobile et tests d’interopérabilité
- Expérimentations de navigation, calibration et retours d’expérience
- Documentation des essais et partage avec la communauté Eirlab
Technologies et outils 🛠️
- CMake, C++
- Python
- Contrôleurs moteurs
- Intégration robotique
Liens et ressources 🔗
- 💻 Code source : GitHub
Un projet pour explorer la mobilité robotique avec EZ Wheel et Reachy.