Getting started
Quick-start : roslaunch
To launch the project, simply run the following command:
roslaunch ronoco ronoco.launch commander:=string compliant_mode:=string end_effector:=string
With as argument :
- commander: the name of the move_group in MoveIt
- compliant_mode: manual if the robot can go into compliant mode manually, None if the robot cannot go into compliant mode, or the name of the service to put it in and out of compliant mode.
- end_effector: the name of the service to manipulate the effector, e.g. "wsg_50_driver/move". It is not necessary to fill in this field
Manual start
To use ronoco it is necessary to launch the ROS modules corresponding to your robot and then the different modules of ronoco.
Regarding the launching of ROS modules the procedure is different for each robot, to make ronoco work it is necessary to have a roscore and Moveit running. See the different examples on Poppy Ergo Jr or Universal Robots 3 for more details.
First set parameters in rosparam
rosparam set commander string
rosparam set compliant_mode string
rosparam set end_effector string
It is then necessary to launch the three modules.
# Launching of nodered in a terminal
node-red
# Launching of ronoco-vm in another terminal
cd $HOME/catkin_ws/src/ronoco/ronoco-vm/
python3 ronoco_vm/run.py
# Launching of ronoco-ui in another terminal
cd $HOME/catkin_ws/src/ronoco/ronoco-ui/
npm start
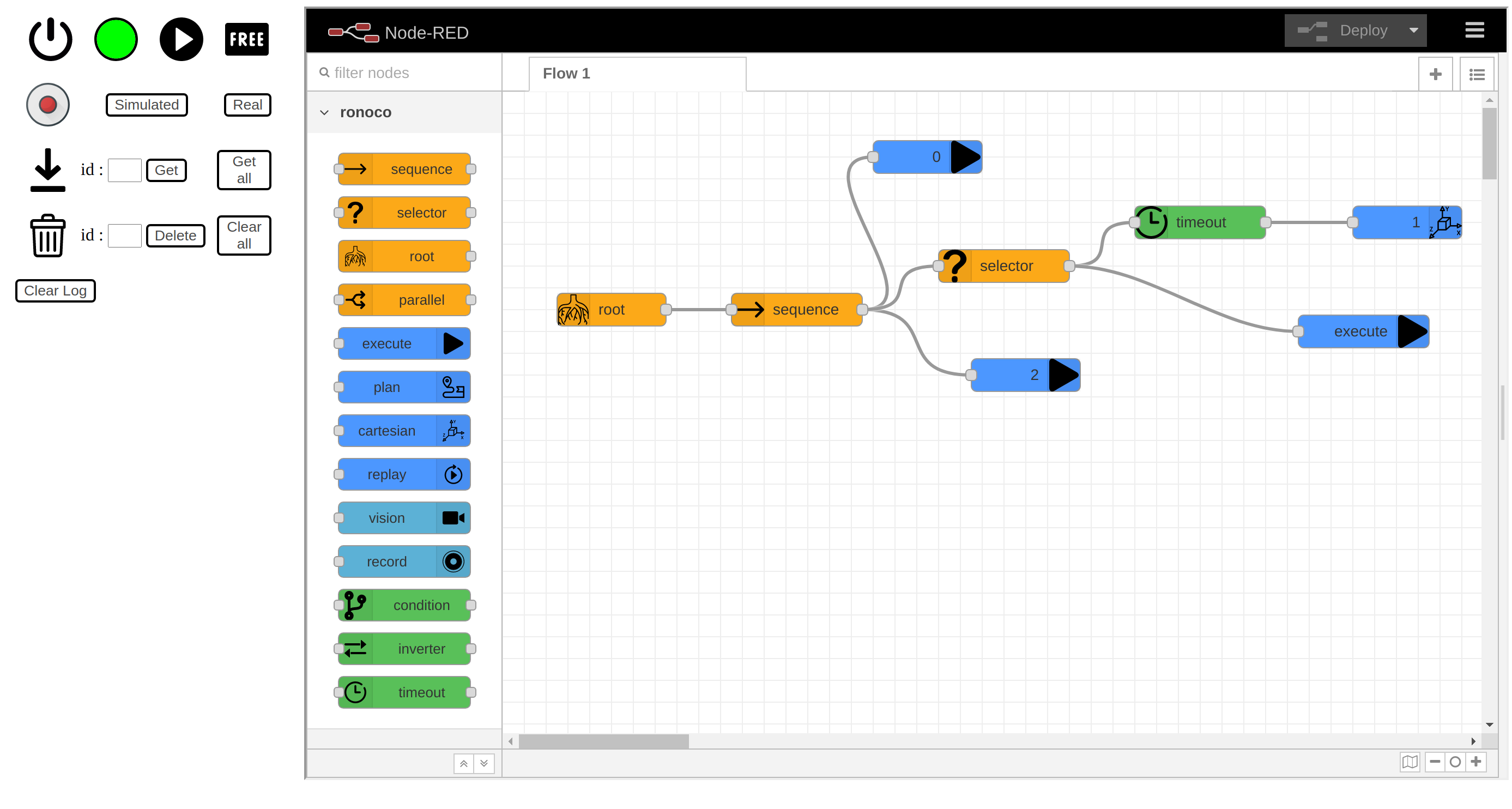
Once all the modules are running go to your localhost:8080 and you will arrive at the ronoco page: