Les threads POSIX
La programmation par thread (activité) est naturelle pour gérer des phénomènes asynchrones. Les entrées utilisateur dans les interfaces graphiques (souris, clavier) sont plus facile à gérer si l'on peut séparer l'activité principale du logiciel de la gestion des commandes utilisateurs. Les entrées sorites multiples sont gérées plus simplement en utilisant des threads.
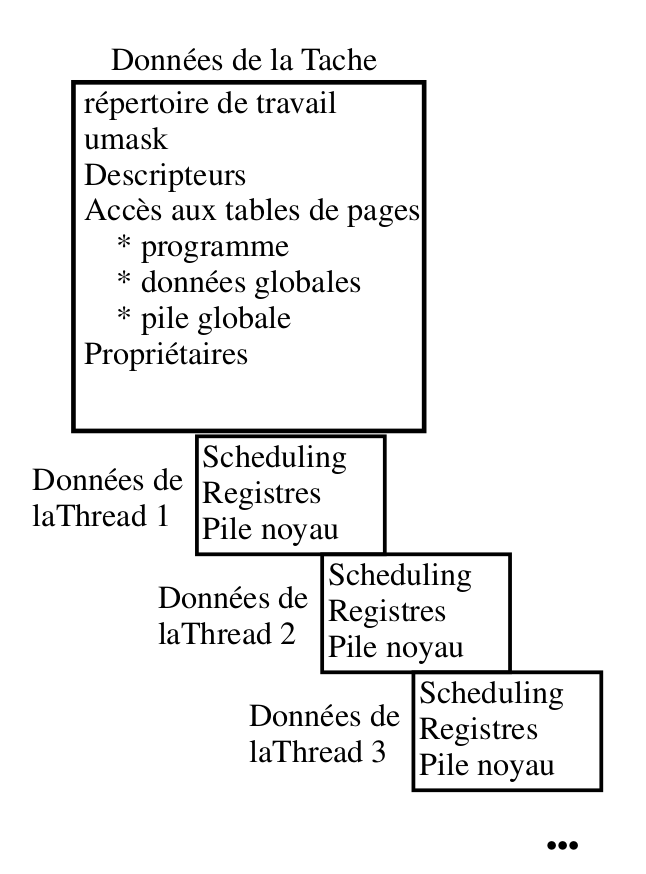
Les activités sont une nouvelle façon de voire les processus dans un système. L'idée est de séparer en deux le concept de processus. La première partie est l'environnement d'exécution, on y retrouve une très grande partie des éléments constitutifs d'un processus en particulier les informations sur le propriétaire, la position dans l'arborescence le masque de création de fichier etc. La deuxième partie est l'activité, c'est la partie dynamique, elle contient une pile, un context processeur (pointeur d'instruction etc), et des données d'ordonancement.
L'idée de ce découpage est de pouvoir associer plusieurs activité au même environnement d'exécution. L'organisation en mémoire pour un processus UNIX avec plusieurs threads est disponible dans la figure ci dessous
On peut grâce au thread gérer plusieurs phénomènes asynchrone dans le même contexte, c'est à dire, un espace d'adressage commun, ce qui est plus confortable que de la mémoire partagée et moins coûteux en ressource que plusieurs processus avec un segment de mémoire partagé. Un processus correspond à une instance d'un programme en cours d'exécution. Un thread correspond à l'activité d'un processeur dans le cadre d'un processus. Un thead ne peut pas exister sans processus (la tâche englobante), mais il peut y avoir plusieurs thread par processus dans le cas de linux il ne peut y avoir de tâche sans au moins une activité.
Description
Un processus est composé des parties suivantes : du code, des données, une pile, des descripteurs de fichiers, des tables de signaux. Du point de vue du noyau, transférer l'exécution à un autre processus revient à rediriger les bons pointeurs et recharger les registres du processeur de la pile. Les divers threads d'un même processus peuvent partager certaines parties : le code, les données, les descripteurs de fichiers, les tables de signaux. En fait, ils ont au minimum leur propre pile, et partagent le reste.
fork et exec
Après un fork, le fils ne contient qu'une seule activité (celle qui a exécuté le
fork). Attention aux variables d'exclusion mutuelle (qui font parti de l'espace
d'adressage partagé) qui sont conservées après le fork() et donc le contenu ne
varie pas. Ainsi si une activité a pris le sémaphore avant le fork(), si
l'activité principale cherche à prendre ce sémaphore après le fork() elle sera
indéfiniment bloquée.
Après un exec, le processus ne contient plus que la thread qui a executé l'une
des six commandes exec. Pas de problème avec les sémaphores comme l'espace
d'adressage a changé.
clone
Sous linux (et rarement sous les sytèmes Unix) il existe un appel système un peu
spécial. Cet appel système réalise un dédoublement de processus comme fork
d'où son nom de clone. Cet appel système permet de préciser exactement ce que
l'on entend partager entre le processus père et le processus fils. Éléments
partageables :
- ppid Création d'un frère au lieux d'un fils
- FS Partage de la structure d'information liée au système de fichier
- FILES Partage de la table des descripteurs
- SIGHAND Partage de la table des gestionnaires de Signaux, mais pas des masques de signaux
- PTRACE Partage du crochet (hook) de debug voir l'appel ptrace
- VFORK Partage du processeur ! le processus père est bloqué tant que le
fils n'a pas exécuté soit
_exitsoitexecve, c'est à dire qu'il s'est détaché de tout les éléments partageable du processus père (sauf lesFILEs) - VM Partage de la mémoire virtuelle, en particulier les allocations et
désallocations par
mmapetmunmapsont visibles par les deux processus. - pid Les deux processus ont le même numéro
- THREAD Partage du groupe de thread, les deux processus sont ou ne sont pas dans le même groupe de threads.
Les noms de fonctions
pthread[_objet]_operation[_np] où
- objet désigne si il est présent le type de l'objet auquel la fonction
s'applique. Les valeurs possibles de objet peuvent être
condpour une variable de condition etmutexpour un sémaphore d'exclusion mutuelle - opération désigne l'opération a réaliser, par exemple
create,exitouinit.
Le suffixe np indique, si il est présent, qu'il s'agit d'une fonction non
portable, c'est à dire Hors Norme.
Les noms de types
pthread[_objet]_t
avec objet prenant comme valeur cond, mutex ou rien pour une thread
Attributs d'une activité
Identification d'une pthread : le TIP de type pthread_t obtenu par un appel
à la primitive : pthread_t pthread_self(void); pour le processus propriétaire
pid_t getpid(void);. En POSIX, le fait de tuer la thread de numéro 1 a pour
effet de tuer les processus ainsi que toutes les autres threads éventuelles du
processus. Pour tester l'égalité de deux pthreads on utilise int pthread_equal(pthread_t tid1, pthread_t tid2);.
Création et terminaison des activités
Création
int pthread_create(pthread_t *p_tid,
pthread_attr_t attr,
void *(*fonction)(void *arg),
void *arg
);
La création et l'activation d'une activité retourne -1 en cas d'échec, 0 sinon.
- le tid de la nouvelle thread est placé à l'adresse p_tid
- attr attribut de l'activité (ordonnancement), utiliser pthread_attr_default
- le paramètre fonction correspond à la fonction exécutée par l'activité après sa création : il s'agit donc de son point d'entrée (comme la fonction main pour les processus). Un retour de cette fonction correspondra à la terminaison de cette activité
- le paramètre arg est transmis à la fonction au lancement de l'activité
Terminaison
- les appels UNIX
_exitet doncexitterminent toutes les threads du processus - terminaison d'une thread
int pthread_exit(int *p_status);
p_status code retour de la thread, comme dans les processus UNIX la thread est
zombifiée pour attendre la lecture du code de retour par une autre thread. À
l'inverse des processus, comme il peut y avoir plusieurs threads qui attendent,
la thread zombie n'est pas libérée par la lecture du p_status, il faut pour
cela utiliser une commande spéciale qui permettra de libérer effectivement
l'espace mémoire utilisé par la thread. Cette destruction est explicitement
demandée par la commande
int pthread_detack(pthread_t *p_tid);
Si un tel appel a lieu alors que l'activité est en cours d'exécution, cela indique seulement qu'à l'exécution de pthread_exit les ressources seront restituées.
Synchronisation
Trois mécanismes de synchronisation inter-activités :
- la primitive
join - les sémaphores d'exclusion mutuelle
- les conditions (évènements)
Le modèle fork/join (Paterson)
Les rendez-vous : join
int pthread_join(pthread_t tid, int **status);
Cette primitive permet de suspendre l'exécution de l'activité courante jusqu'à
ce que l'activité tid exécute un appel (implicite ou explicite) à
pthread_exit. Si l'activité tid est déjà terminée, le retour est immédiat,
et le code de retour de l'activité visée est égal à **status (double
indirection). La primitive retourne 0 en cas de succès et -1 en cas d'erreur.
Le problème de l'exclusion mutuelle sur les variables gérées par le noyau
Il est nécessaire d'avoir plusieurs variables errno, une par activité. En
effet cette variable globale pourrait être changée par une autre activité. Voir
plus loin comment définir des variables globales locales à chaque activité.
Les sémaphores d'exclusion mutuelle
Ces sémaphores binaires permettent d'assurer l'exclusion mutuelle.
- Il faut définir un objet de type
pthread_mutex_tqui correspond à un ensemble d'attributs de typepthread_mutexattr_t - Initialiser la variable par un appel à la fonction
int pthread_mutex_init(pthread_mutex_t *p_mutex,
pthread_mutexattr_t attr);
- On pourra détruire le sémaphore par un appel à la fonction
int pthread_mutex_destroy(pthread_mutex_t *p_mutex);
Utilisation des sémaphores
Opération P : Un appel à la fonction pthread_mutex_lock(pthread_mutex_t *pmutex); permet à une activité de réaliser une opération P sur le sémaphore.
Si le sémaphore est déjà utilisé, l'activité est bloquée jusqu'à la réalisation
de l'opération V (par une autre activité) qui libèrera le sémaphore.
Opération P non bloquante : pthread_mutex_trylock(pthread_mutex_t *pmutex);
renvoie 1 si le sémaphore est libre, 0 si le sémaphore est occupé par une autre
activité et -1 en cas d'erreur.
Opération v : un appel à la fonction pthread_mutex_unlock(pthread_mutex_t *pmutex); réalise la libération du sémaphore désigné.
Les conditions (évènements)
Les conditions permettent de bloquer une activité sur une attente d'évènement.
Pour cela l'activité doit posséder un sémaphore, l'activité peut alors libérer
le sémaphore sur l'évènement, c'est à dire : elle libère le sémaphore, se bloque
en attente de l'évènement, à la réception de l'évènement elle reprend le
sémaphore. Initialisation d'une variable de type pthread_cond_t se fait avec
la fonction
int pthread_cond_init(pthread_cond_t *p_cond, pthread_condattr_t attr);
L'attente sur une condition se fait via la fonction suivante
int pthread_cond_wait(pthread_cond_t *p_cond, pthread_mutex_t *p_mutex);
- libération du sémaphore
*p_mutex - activité mise en sommeil sur l'évènement
- réception de l'évènement, récupération du sémaphore
La condition est indépendante de l'évènement et n'est pas nécessairement valide à la reception.
Ordonnancement des activités
L'ordonnancement POSIX des activités
L'ordonnancement des activités DCE basé sur POSIX est très similaire à
l'ordonnancement des activités sous MACH. Deux valeurs permettent de définir le
mode d'ordonnancement d'une activité : la politique et la priorité. Pour
manipuler ces deux valeurs, il vous faut créer un objet attribut d'activité
(pthread_attr) en appelant pthread_attr_create(), puis changer les valeurs par
défaut avec les fonctions décrites plus loin et créer la pthread avec cet objet
pthread_attr. Ou bien la pthread peut elle-même changer ses deux valeurs,
priorité et politique. Les fonctions sont :
#include <pthread.h>
pthread_attr_setsched(pthread_attr_t *attr, int politique);
pthread_attr_setprio(pthread_attr_t *attr, int prio);
Les différentes politiques possibles sont :
SCHED_FIFOla thread la plus prioritaire s'exécute jusqu'à ce qu'elle bloque. Si il y a plus d'une pthread de priorité maximum, la première qui obtient le cpu s'exécute jusqu'à ce qu'elle bloqueSCHED_RRRound Robin. La thread la plus prioritaire s'exécute jusqu'à ce qu'elle bloque. Les threads de même priorités maximum sont organisées avec le principe du tourniquet, c'est à dire qu'il existe un quantum de temps au bout duquel le cpu est préempté pour une autre thread.SCHED_OTHERComportement par défaut. Tous les threads sont dans le même tourniquet, il n'y a pas de niveau de priorité, ceci permet l'absence de famine. Mais les threads avec une politiqueSCHED_FIFOouSCHED_RRpeuvent placer les threadsSCHED_OTHERen situation de famine.
Les variables spécifiques à une thread
Avec un processus multi-thread, nous sommes dans une situation de partage de
données. Toutes les données du processus sont à priori manipulables par toutes
les threads. Or certainns données sont critiques et difficilement partageables.
Premièrement ce sont les données de la bibliothèque standard. Pour les fonctions
de la bibliothèque standard, on peut résoudre le problème en utilisant un
sémaphore d'exclusion mutuelle pthread_mutex_t pour POSIX.
Mais certaines variables ne peuvent être protégées. C'est le cas de la variable
errno, comme nous l'avons vu précédemment. Pour cette variable, la solution
est d'avoir une variable par thread. Ainsi le fichier <errno.h> contient
extern int *_errno();
#define errno (*_errno())
La valeur errno est obtenue par une fonction qui retourne la valeur de errno
associée à la thread qui fait l'appel à _errno.
Principe général des données spécifiques, POSIX
L'idée des données spécifique est de créer un vecteur pour chaque donnée
spécifique. Ainsi pour des données spécifique statiques, chaque thread possède
son propre exemplaire. Les données spécifiques sont identifiées par des clés de
type pthread_key_t.
Création de clés
La création d'une clé est liée à la création d'un tableau statique (variable globale), initialisé à NULL à la création. La fonction
#include <pthread.h>
int pthread_keycreate(pthread_key_t *p_cle,
void (*destructeur)(void *valeur));
permet la création du tableau, 0 succès et -1 échec. La structure pointée par
p_cle nous permettra d'accéder aux valeurs stockées, la clé est évidemment la
même pour toutes les threads. Le paramètre destructeur de type pointeur sur
fonction prenant un pointeur sur void en paramètre et renvoyant void, donne
l'adresse d'une fonction qui est exécutée à la terminaison de la thread (ce qui
permet de faire le ménage). Si ce pointeur est nul, l'information n'est pas
détruite à la terminaison de l'activité.
Lecture / écriture d'une variable spécifique
La fonction
#include <pthread.h>
int pthread_getspecific(pthread_key_t *p_clé, void **pvaleur);
permet la lecture de la valeur qui est copiée à l'adresse pvaleur retourne 0
ou -1 selon que l'appel a réussi ou non. La fonction
#include <pthread.h>
int pthread_setspecific(pthread_key_t *p_clé, void *valeur);
permet la création du tableau, 0 succès et -1 échec. La structure pointée par
p_cle nous permettra d'accéder aux valeurs stockées, la clé est évidemment la
même pour toutes les threads. Le paramètre destructeur de type pointeur sur
fonction prenant un pointeur sur void en paramètre et renvoyant void, donne
l'adresse d'une fonction qui est exécutée à la terminaison de la thread (ce qui
permet de faire le ménage). Si ce pointeur est nul, l'information n'est pas
détruite à la terminaison de l'activité.
Les fonctions standardes utilisant des zones statiques
Certaines fonctions standardes comme ttyname() ou readdir() retourne
l'adresse d'une zone statique. Plusieurs threads en concurrence peuvent donc
nous amener à des situations incohérentes. La solution des sémaphores
d'exclusion étant coûteuse, ces fonctions sont réécrites pour la bibliothèque de
thread de façon à être réentrantes.
Attention les problèmes de réentrance peuvent avoir lieu en utilisant des appels systèmes non réentrant dans les handlers des signaux ! Ceci sans utiliser de threads !