À partir d'une position initiale, le robot tourne de θ puis avance de t puis tourne de α puis avance de d. Donner son positionnement dans le repère (x,y,θ).
Le robot tourne de θ puis avance de t. Dans le repère ΩO=(O,i,j) :
TΩO=(uv)=t.(cosθsinθ)
Puis, le robot tourne de α puis avance de d. Dans le repère ΩC=(C,x,y) :
Dans quel espace ? : Le mécanisme à 3 degrés de liberté
Quels sont les variables ? : Les entrées vont être le tuple de θ ainsi que les longueurs des 3 paramètres t
**Poser le problème
** : Dans le modèle directe on souhaite trouver les coordonées cartésiennes en fonction des θ et des longueurs t. Le modèle inverse lui fournit la position des différents joints θ en fonction de la position cartésienne de l'effecteur.
Nous cherchons à déterminer x tel que f(x)=0. Nous connaissons une approximation de x noté x0. Nous avons f(x0)−f(x)=f′(x0).(x0−x) avec f(x)=0 nous obtenons :
x=x0−f′(x0)f(x0)
Le schéma de Newton est donc
xk+1=xk−f′(xk)f(xk)
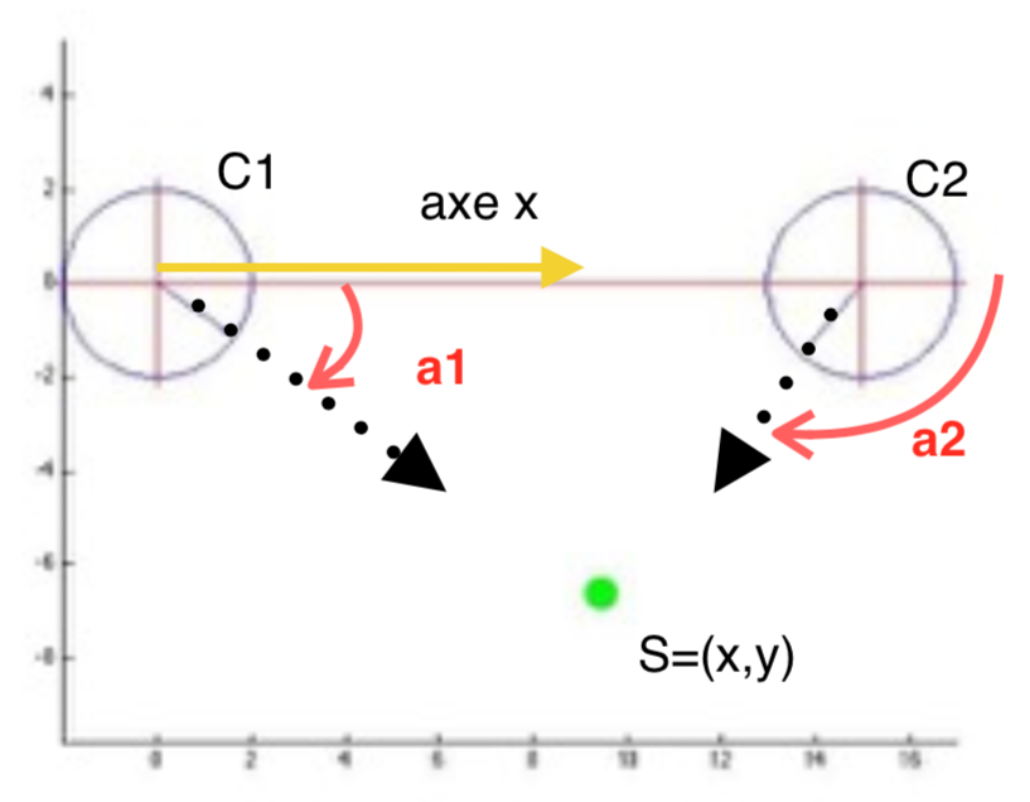
C1 et C2 sont les positions des goniomètres, a1 et a2 sont les mesures angulaires et S la position du robot.
Nous cherchons donc à résoudre l'équation A.x=b cependant la résolution avec x=A−1.b peut s'avérer trop complexe dans certaines situations. Nous allons donc utiliser une décomposition SVD pour résoudre l'équation, la décomposition s'écrit alors svd(A)=U.S.VT. Détails sur la décomposition SVG
Soit le système An×m.xm×1=bn×1 avec n<m. Par exemple x1+x2=4 est un système sous contraints. Il existe une infinité de solution et nous cherchons à en carctériser une. La résolution va se réaliser en résoluvant argminH(x) avec H(x)=xTx+λT(Ax−b).
Pour résoudre des systèmes sosus contraints nous allons avoir besoin d'une notion supplémentaire : la pseudo inverse. La pseudo inverse (droite) se définit comme : AR+=AT(AAT)−1=i=1∑Nσ−1viuiT.
La solution d'un système linéaire sous contraint est donc x=AR+b+i=n+1∑mαivi∀αi=AR+b+[I−AR+A]ω. Nous pouvons remaquer que Ax=b⇔A(x+z)=b avec Az=0, z est donc choisi dans le noyau de la matrice A.